
The original image is here, (12MB).
{kind=link}
There is a similar image available from the Irish Met Office here.



/*
* Christmas tree star LED driver. Simulate "supernova" effect
* with lots of artistic licence. You need 3 x transistors
* to power LEDs.
*
*
* See blog post:
* http://jdesbonnet.blogspot.com/2010/12/arduino-powered-christmas-tree-star.html
*
* Joe Desbonnet
* jdesbonnet@gmail.com
* This is public domain code. No copyright is asserted.
*/
// Define pins for Red, Green and Blue LEDs.
int LEDR = 9;
int LEDG = 10;
int LEDB = 11;
void setup() {
// nothing to setup
}
void loop() {
int i;
setRGB(0,0,0);
// Fist a red faint red glow... growing slowly
for (i = 0; i < 16; i++) {
setRGB(i,0,0);
delay(500);
}
// Getting brighter faster now
for (i = 16; i < 64; i++) {
setRGB(i,0,0);
delay(100);
}
// Add some gree to make the light yellow (like dawn)
for (i = 64; i < 200; i++) {
setRGB(i,i-64,0);
delay(100);
}
// Now a bit of blue
for (i = 200; i < 255; i++) {
setRGB(i,i-64,i-200);
delay(100);
}
// Flash
setRGB(255,220,128);
delay(10);
setRGB(0,0,0);
delay (100);
// Another flash
setRGB(255,255,200);
delay(10);
setRGB(0,0,0);
delay (100);
// More flashes, with random color variations and intervals
for (i = 0; i < 32; i++) {
setRGB (random(192,255),
random(192,255),
random(192,255) );
delay(20);
setRGB(0,0,0);
delay (random(50,200));
}
// End of program... switch LED on full all channels (~ white)
setRGB(255,255,255);
// Loop forever
while (1);
}
void setRGB (int r, int g, int b) {
analogWrite(LEDR,r);
analogWrite(LEDG,g);
analogWrite(LEDB,b);
}









.jpg)



.png)

.png)
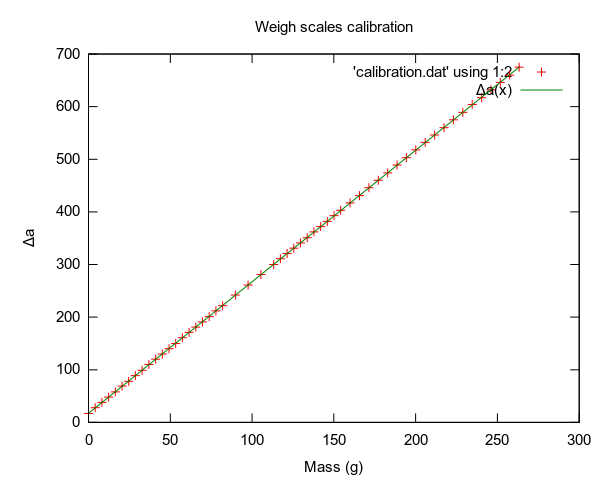
 Instead of wiring the excite wires to the power/ground rail, two digital IO output lines (D0 and D1 in the schematic) are used to excite the sensor. With D0 set to logic high (5V) and D1 set to logic low (0V) a measurement is taken: a0 = 2.5V + ΔV. By toggling the IO lines the excitation polarity is reversed and another measurement is taken: a1 = 2.5V - ΔV. The difference (Δa = a0 - a1) is 2.5V + ΔV - 2.5V + ΔV = 2ΔV. The measuring resolution is doubled. Another advantage of this setup is that is helps eliminate common mode interference.
Instead of wiring the excite wires to the power/ground rail, two digital IO output lines (D0 and D1 in the schematic) are used to excite the sensor. With D0 set to logic high (5V) and D1 set to logic low (0V) a measurement is taken: a0 = 2.5V + ΔV. By toggling the IO lines the excitation polarity is reversed and another measurement is taken: a1 = 2.5V - ΔV. The difference (Δa = a0 - a1) is 2.5V + ΔV - 2.5V + ΔV = 2ΔV. The measuring resolution is doubled. Another advantage of this setup is that is helps eliminate common mode interference.

/**
* Take measurement from weigh scales sensor and output to serial
* port. By reversing polarity of excite signal can reduce common
* mode noise. Take 256 samples and get mean before outputing
* result -- this helps reduce noise and adds extra resolution.
* Joe Desbonnet, 28 Oct 2010. jdesbonnet@gmail.com.
*/
// Define bridge excite digital IO lines
#define D0 3
#define D1 2
// Use ADC port 0
#define AN0 0
// Delain in microseconds to allow signal to settle
// after excite polarity reversal
#define DELAY 800
void setup() {
Serial.begin(115200);
pinMode(D0, OUTPUT);
pinMode(D1, OUTPUT);
}
void loop()
{
// Get zero point ('tare') of scale
int tare = measure ();
while (true) {
Serial.println ( measure() - tare );
delay (1000);
}
}
int measure () {
int i,a0,a1;
long s;
for (i = 0; i < 256; i++) {
digitalWrite (D0,HIGH);
digitalWrite (D1,LOW);
delayMicroseconds(DELAY);
a0 = analogRead(AN0);
// reverse polarity
digitalWrite (D0,LOW);
digitalWrite (D1,HIGH);
delayMicroseconds(DELAY);
a1 = analogRead(AN0);
s += (long) (a0 - a1);
} // next i
// Don't care about polarity
if ( s < 0) {
s = -s;
}
// As there is a large number of samples being averaged we
// can probably extract another bit or two from the ADC.
// Going to be conservative and going for one extra bit.
// So instead of dividing by 256, will divide by just 128
// instead (ie right shift 7 bits).
return s>>7;
}

.png)




AB, AB, AB, 2D, 00, 0B, 5A, 40, 98, 00, 02, 00, 41After some experimentation this is what I believe the packet consists of:
| 0 | Sync, always 0xAB |
| 1 | Sync, always 0xAB |
| 2 | Sync, always 0xAB |
| 3 | Sync end, always 0x2D |
| 4 | ? always 0x00 |
| 5 | Device address high byte (always 0x0D for my device) |
| 6 | Device address low byte (always 0x5A for my device) |
| 7 | sbssaaaa where s = bits of sampling period, b = battery low indicator (0 = low) and aaaa is the upper 4 bits of sensor A. 0-00---- = 6s sampling, 1-01---- = 12s sampling, 0-10---- = 18s sampling. It's odd that ‘b’ is sandwiched in among s bits. |
| 8 | Least significant 8 bits of sensor input A (nearest MCU edge of board) |
| 9 | ? probably upper 4 bits of sensor B and C. |
| 10 | Least significant 8 bits of sensor input B (middle) |
| 11 | Least significant 8 bits of sensor input C |
| 12 | Checksum (arithmetical sum of bytes 4 - 11). |

#include#include "efergy_config.h" #include "efergy_elite_decode.h" byte getPulseWidth(); byte getBit (); byte getByte (); void resync(); byte t3,t4,tm; /** * Decode baseband radio signal from Efergy Elite receiver. * * Packet consists of a radio preamble of what seems * like random noise for about 200ms followed by a quiet period * of 100ms followed by data for 200ms. Encoding is a FSK type * scheme. * Logic 0 is represented by 3 cycles of "low" frequency square * wave (period 8t per cycle). * Logic 1 is represented by 4 cycles of "high" frequncy square * wave (period 6t per cycle). * Logic 0 and Logic 1 have the same period of 24t which is * very approx 2ms [confirm]. Ie t ~= 83 microseconds. * * +---+ +---+ +---+ * | | | | | = Logic 0 * +--| +---+ +---+ * +--+ +--+ +--+ +--+ * | | | | | | | = Logic 1 * +-+ +--+ +--+ +--+ * * Decoding this not but looking at frequency, but looking * for 3 long pulses in succession or 4 short pulses. * * Data has 3 bytes of synchronization: 0xAB, 0xAB, 0x2D. * Look initially for 0xAB to get byte boundary synchronization. * Then look for 0x2D to flag start of actual data. * * All inter-pulse calculation must be complete * within 64x5 microseconds ie ~ 300 microseconds or 300 instructions @ 4MHz) */ byte decodeEfergy(unsigned char *buf) { byte i,bitc=0, bytec=0, b=0; byte t,pt; //byte bufIndex=0; unsigned int rt=0; t3=0x1a; // short pulse duration of 3t t4=0x23; // long pulse duration of 4t tm = 0x1e; // mean of short and long pulse, ie 3.5t resync: // Look for sync bit sequence // TODO: update: just look for AB followed by 2D. // Get byte boundary sync while (b != 0xAB) { b = (b<<1) | getBit(); } for (i = 0; i < 8; i++) { b = (b<<1) | getBit(); } if (b != 0xAB) { goto resync; } for (i = 0; i < 8; i++) { b = (b<<1) | getBit(); } if (b != 0x2D) { goto resync; } b=0; // 9 bytes left to retrieve do { b = (b<<1) | getBit(); bitc++; if (bitc == 8) { buf[bytec++] = b; b=bitc=0; } } while (bytec < 9); // Calculate checksum byte cs = 0; for (i = 0; i < 8; i++) { cs += buf[i]; } // Display checksum fail if they don't match if (cs != buf[8]) { return 4; } return 0; } byte getByte () { byte i,b; for (i = 0; i < 8; i++) { b = (b<<1) | getBit(); } return b; } byte getBit () { char t; byte nshort=0,nlong=0; while (1) { t = getPulseWidth(); if ( t < tm) { nshort++; } else { nlong++; } // Check for anomalous condition if ( (nshort>0) && (nlong>0) ) { nshort=nlong=0; if ( t < tm) { nshort=1; } else { nlong=1; } } if (nshort == 4) { return 1; } if (nlong == 3) { return 0; } } } byte getPulseWidth() { byte t=0; while (RADIOBB_PIN) { CLRWDT(); } while ( ! RADIOBB_PIN) { t++; } return t; } void resync () { byte pt,t; restart_resync: // Can have either 3t (short) or 4t (long) pulse. Get pulses of // two different lengths. 3t is the short pulse, 4t is the long one. pt = getPulseWidth(); do { t = getPulseWidth()+2; } while (t - pt < 4); t -= 2; if (pt < t) { t3 = pt; t4 = t; } else { t3 = t; t4 = pt; } if (t4 < 0x1A) { //TXREG='s'; goto restart_resync; } if (t4 > 0x30) { //TXREG='l'; goto restart_resync; } // Didn't have to do this at the sensor, but receiver has a lot more incoming crud if ( ((t4>>2)*3 ^ t3) & 0b11111100 ) { // (t4/4)*3 ~= t3 (ignoring 2 LSB of precision) //TXREG='?'; goto restart_resync; } // tm is mean of t3 and t4 tm = (t3+t4)>>1; byte b=0; // Look for sync bit sequence while (b != 0xAB) { b = (b<<1) | getBit(); } }

_id,latitude,longitude,rssi,logdate,mcc,mnc,lac,cellid,site_lat,site_lng,tech,ber,callstate,roaming 1,51766086,-9613348,-99,14 Aug 2010 13:56:03,272,1,47,11011,52181474,-1357067,GPRS,-1,IDLE,NO 2,51766086,-9613348,-99,14 Aug 2010 13:56:26,272,1,47,11011,52181474,-1357067,GPRS,-1,IDLE,NO 3,51766086,-9613348,-99,14 Aug 2010 13:56:27,272,1,47,11011,52181474,-1357067,GPRS,-1,IDLE,NO










m(return) (select mode) 3(return) (select UART mode) 6(return) (select baud rate of 19200) (return) (select 8 bits, no parity - default) (return) (select 1 stop bit - default) (return) (select idle 1 - default) (return) (select open drain, high = high impedance, low = GND)
pk2cmd -PPIC16F627A -FSIODemo.hex -M -T -R
pk2cmd -PPIC16F627A -W
pk2cmd -PPIC16F627A -T -R


L no params Query LED state. Will return “ON” or “OFF”. L ‘0’ or ‘1’ Turn LED on or off respectively. L ‘t’ Toggle LED state R no params Reset device T no params Return toc timer Z no params Put device to sleep. Will confirm with “SLEEP” message. Hit any key to wake device. Will display “WAKE” message on waking.
ERR 2 Unrecognized command ERR 3 Bad command parameters

/**
* Example of a serial IO shell for a PIC.
* Rev 27 June 2010.
* (c) 2010 Joe Desbonnet, jdesbonnet@gmail.com.
* Distributed under the "Simplified BSD License".
*
* This example is intended as a starting point for writing low power PIC apps
* that need to be controlled over a serial port.
*
* This program will listen on the PIC's serial port for commands sent from a
* human user via a terminal emulator or commands issued from another application.
* In this example commands are L, L0, L1, Lt (LED status, off, on, toggle
* respectively, R (reset), T (get sleep clock 'tocs'), Z (go to sleep). See
* comments at execCmd() function for more details.
*
* During sleep mode the device uses very little power (micro watts) and can
* stay powered on 2 x AAA batteries for months.
*
* Tested with 'Lite' version of HiTech C compiler for PIC on target
* platform PIC16F627A and 16F628A. This code should be read in together with the
* PIC datasheet which can be downloaded from http://www.microchip.com
*
* This program occupies most of the available space of a 16F627A. However the
* use of stdio functions and liberal use of printf() accounts for a large portion
* of the space used. For practical apps long string messages are not required and
* the use of printf() can often be avoided.
*
* It is assumed that there is a LED on RB3 (pin 9) which must have a limiting
* resistor of ~ 500 ohms. The serial port RX and TX and connected to pins
* 7 and 8 respectively. Also the RX line (pin 7) and INT (pin 6) are tied together
* to facilitate wake on serial port activity.
*
* NB: Do not connect RX and TX directly to RS232 as the voltage levels (typically
* -15V to -3V for logic 1 and +3V to +15V for logic 0) are not compatible
* with PIC logic levels 0/ ~5V.
*
* Simplified schematic:
*
* +-----------+
* | PIC |
* |16F627/8(A)|
* | |
* GND------|Vss Vdd|------ 2 - 5V
* | |
* +---|INT |
* | | |
* ----+---|RX |
* | |
* --------|TX |
* | |
* +-----|RB3 |
* | +-----------+
* 500ohm
* |
* LED
* |
* GND
*
* Not shown: logic <--> RS232 conversion, optional crystal resonator.
*
* It is generally recommended that unused input pins are tied either high
* or low through a ~ 10K resistor. However I have found that if setup correctly
* (specifically MCLR and LVP are disabled) unused pins can be left floating.
*
*/
#include <htc.h>
#include "stdio.h"
// Bit manipulation macros
#define BIT(x) (1 << (x))
#define SETBIT(p,b) (p) |= BIT(b)
#define CLRBIT(p,b) (p) &= ~BIT(b)
#define TOGBIT(p,b) (p) ^= BIT(b)
#define TSTBIT(p,b) (p) & BIT(b)
/*
Configuration Word:
Oscillator
--------------
HS: High speed external oscillator
INTIO: Internal oscillator (4MHz)
Remember to set FOSC accordingly.
Watch Dog Timer (WDT)
--------------
WDTEN: Watch dog timer enable
WDDIS: Disable watch dog timer
When enabled a SLEEP operation will resume at the next instruction when the timer
rolls over. Otherwise SLEEP can only be interrupted by an external event. It takes
about 2 seconds for the timer to roll over. A simple low-accuracy sleep clock can
be made by counting the SLEEP/wake cycles. The device can be awoken after a set
period of time this way (not implemented in this version). When the WDT is enabled
a WDT roll over while awake will cause a device reset which we don't want in the
application. So it's important that the WDT is cleared periodically by calling
CLRWDT().
Other features
--------------
Unused features are disabled.
PWRTDIS: Power up timer disable
BODIS: Brownout reset disable
UNPROTECT: Code protection disable
MCLRDIS: Master Clear disable. Prevents spontaneous resets if MCLR left floating.
LVPDIS: Low Voltage Programming disable. Prevents problems if RB4/PGM pin left floating.
A note about MCLR and LVP features: if you do enable those features, it is vital
that you *don't* allow MCRL and PGM pins to float. Tie them high or low via a
~ 10K resistor. If you don't you will probably experience spontaneous resets
and intermittent failures.
*/
__CONFIG(INTIO & WDTEN & PWRTDIS & BORDIS & UNPROTECT & MCLRDIS & LVPDIS);
// Oscillator frequency. Set to 4000000UL if using internal oscillator. Else
// set to the external crystal frequency.
//#define FOSC 10000000UL
#define FOSC 4200000UL
// Desired serial port baud rate. In theory any value is possible, but the
// traditional values are 300, 1200, 2400, 4800, 9600, 19200, 38400, 112500
// [Note about max speed, 19200 max with internal 4MHz osc?]
#define BAUD 19200
#define BUF_LEN 8 // Define the length of the command buffer
#define LED_PIN RB3 // Define LED pin.
#define LED_TRIS TRISB3 // Define LED tri-state bit (for configuration to output)
// Function prototypes
unsigned char execCmd();
void prompt();
void crlf();
// Flags shared with ISR. For convenience using an entire 8 bit value to represent
// a single flag. A value 1 being set, 0 being clear. This is wasteful and you may
// want to use individual bits of a one general flags variable if space becomes tight.
volatile unsigned char sleepMode; // set to 1 if currently SLEEPing as much as possible
volatile unsigned char wakeFlag; // set to 1 by ISR to signal to main loop to wake up
volatile unsigned char cmdFlag; // set to 1 by ISR to signal to main loop that ENTER was received
volatile unsigned char bufp; // indicates the position of the next free char in the buffer
char buf[BUF_LEN]; // command buffer
unsigned int toc = 0; // initialize our simple clock to 0
/**
* Initialize hardware
*/
void init(void) {
//
// Configure serial port
//
// Serial Port Baud Rate Generator. Ref sect 12.1
// "USART Baud Rate Generator (BRG)", page 75 of datasheet.
SPBRG = (int)( FOSC / (16UL * BAUD) - 1 );
// Receive Status register
// 1--- ---- SPEN (Serial Port Enable)
// ---1 ---- CREN (Continuous Receive Enable)
RCSTA = 0x90;
// Transmit Status register
// --1- ---- TXEN (Transmit Enable)
// ---- -1-- BRGH (High baurd rate select)
TXSTA = 0x24;
//
// Configure interrupts
//
GIE = 1; // Enable all unmasked interrupts
PEIE = 1; // Enable all unmasked peripheral interrupts
INTE = 1; // Enable external interrupt on RB0 (also tied to RX for wake-on-RX)
RCIE = 1; // Enable RX interrupt (only works while awake)
//
// Configure LED pin as output
//
LED_PIN = 0; // Set to off on latch
LED_TRIS = 0; // Set pin as output
}
void main(void){
unsigned char status;
init(); // Initialize hardware
// Display welcome message. NB: use of printf draws in 100s of bytes of library
// code. Use only if you have to. I recommend not using stdio.h functions and
// using the using putch() function defined here to output short messages.
crlf();
printf ("Demo PIC application. Version 1.0");
crlf();
prompt();
// Main loop
while (1) {
// Display wake message if we are awakened from SLEEP
if ( wakeFlag ) {
sleepMode = 0;
wakeFlag = 0; // reset wakeup flag
// Display wake message and prompt
crlf();
crlf();
printf ("WAKE");
crlf();
prompt();
}
// If command entered (chars + ENTER key on serial port) execute command
if ( cmdFlag ) {
crlf();
// Less than 2 chars (including CR) in command buffer is empty commmand.
if (bufp >= 2) {
// Execute the command
status = execCmd();
// Display OK message if successful, error message otherwise.
if ( status == 0 ) {
printf ("OK");
} else {
printf ("ERR %d", status); // NB: %d pulls in *lots* of lib code
}
crlf();
// If sleepMode set it must mean that we have just been issued
// a sleep command (as we have to be awake to receive a command).
// Display a SLEEP message to indicated to the user that the device
// is now asleep.
if (sleepMode) {
printf ("SLEEP");
crlf();
}
}
// Reset command buffer
bufp = 0;
cmdFlag = 0;
// Display prompt for next command if in wake mode
if ( ! sleepMode) {
prompt();
}
}
if (sleepMode) {
putch ('Z');
// Can (optionally) disable INT interrupt while awake.
// If INT is left running the ISR will be called for every
// incoming bit transition in the RX line. While this should
// not cause a problem, it is causing unnecessary CPU activity
// which generally should be avoided.
INTE=1; // Enable INT to facilitate wake on RX
SLEEP(); // Sleep until INT or Watch Dog Timer expires
INTE=0; // INT not needed while awake.
toc++; // Update our simple clock
} else {
CLRWDT(); // If awake, clear watch dog timer as often as possible
}
}
}
/**
* This function parses the command buffer (buf) after the user hits the
* RETURN key and executes whatever command that may have been entered.
* Commands are letters (upper or lower) followed by optional arguments.
*
* L <RETURN> - Display LED status
* L0 <RETURN> - LED on
* L1 <RETURN> - LED off
* Lt <RETURN> - LED toggle
* R <RETURN> - Reset device
* T <RETURN> - Display sleep clock
* Z <RETURN> - Put device to sleep. Any key will re-awaken.
*
* @return status code.
* 0: success
* 2: unrecognized command
* 3: bad parameter
*/
unsigned char execCmd() {
// Get command letter (assume first char is letter) and convert to
// uppercase using bit manipulation (set bit 5 low)
char c = buf[0];
CLRBIT (c,5); // Convert to uppercase by clearing bit 5 to 0.
switch (c) {
// LED command.
case 'L':
if (bufp == 2) {
printf ("LED is ");
if (LED_PIN) {
printf ("ON");
} else {
printf ("OFF");
}
crlf();
return 0;
}
c = buf[1];
if (c == '0') {
LED_PIN = 0; // LED off
return 0; // Return OK
}
if (c == '1') {
LED_PIN = 1; // LED on
return 0; // Return OK
}
if (c == 't') {
LED_PIN = ! LED_PIN;// LED toggle
return 0;
}
return 3; // Return bad parameter error
// break not required
// Reset command
case 'R':
printf ("RESET"); // Indicate to user that device is about to be reset
crlf();
asm ("goto 0"); // Jump to addr 0 achieves a reset
// break not required
// Sleep timer query
case 'T':
printf ("%d",toc); // WDT takes about 2s to roll over. x2 to get seconds
crlf();
return 0;
// break not required
case 'Z':
sleepMode = 1; // Enable sleep mode. Next iter of main loop will put dev to sleep
break;
// Unrecognized command
default:
return 2;
}
// Return success code
return 0;
}
/**
* Interrupt Service Handler (ISR)
*
* Any enabled interrupt will cause the CPU to jump to this routine. The C compiler
* takes care of saving context at the start and restoring it when finished. The
* code in the ISR needs to check interrupt status flags to see which interrupt(s)
* caused the ISR to be invoked. The ISR should be kept as short as possible. In
* general if work needs to be performed as a result of an interrupt *don't* do it
* in the ISR. Instead set a flag and have the main loop poll the flag and have it
* do the work.
*
* Variables modified by ISR:
* wakeFlag
* bufp
*
* Note variables that are modified here
* must be declared 'volatile'. This is because an optimising C compiler will
* make incorrect optimisations based on the false assumption that the
* value cannot spontaneously change. See this article for a discussion:
* http://www.embedded.com/story/OEG20010615S0107
*/
interrupt isr () {
unsigned char c;
// Check if INT interrupt was triggered
if ( INTF ) {
if (sleepMode) {
wakeFlag=1; // Tell main loop we are awake now
}
INTF = 0; // Clear interrupt flag (else isr will be called again on exit)
}
// May have more than one char in the buffer - so need to loop until buffer empty. Else we can have lag (?)
while (RCIF) {
c = RCREG; // Read from USART and add to command buffer
// ESC (ASCII code 27) key causes immediate reset at all times.
if (c == 27) {
asm("GOTO 0"); // Jumping to address 0 is how device reset is achieved
}
TXREG = c; // Echo back char if possible
buf[bufp++] = c; // Add char to buffer
// If ENTER or buffer full signal to main loop that we have command
if (c == '\r' || bufp == BUF_LEN -1) {
buf[bufp]=0; // Zero terminate for safety (TODO: this added lots of bytes to code -- can we optimize?)
cmdFlag = 1; // tell main loop we have a command entered
break; // Exit loop: any further chars in buffer can be ignored
}
}
}
/**
* Send a character to serial port. If buffer is full then wait until space
* is available. Will wait indefinitely.
*/
void putch(unsigned char c) {
while ( ! TXIF ) ; // Loop until TX register available
TXREG = c; // Write character to TX register
}
/**
* Write CR LF (new line) sequence to serial port.
*/
void crlf () {
putch ('\r');
putch ('\n');
}
/**
* Write command prompt to serial port.
*/
void prompt () {
putch ('>');
putch (' ');
}
{kind=link}